 平台热线
平台热线



目标
实现通过机器人示教器完成3D视觉定位机械臂抓取无序物体分拣的动作规划。
解决问题
机器人配合3D视觉抓取 http://aubo-robotics.cn/NewsDetail/689663.html,准备点如何计算才能保证机器人取料路径(准备点->吸取点)垂直于吸取平面,如下图?


思路
1、工具坐标系Z轴和flange_center坐标系Z轴平行
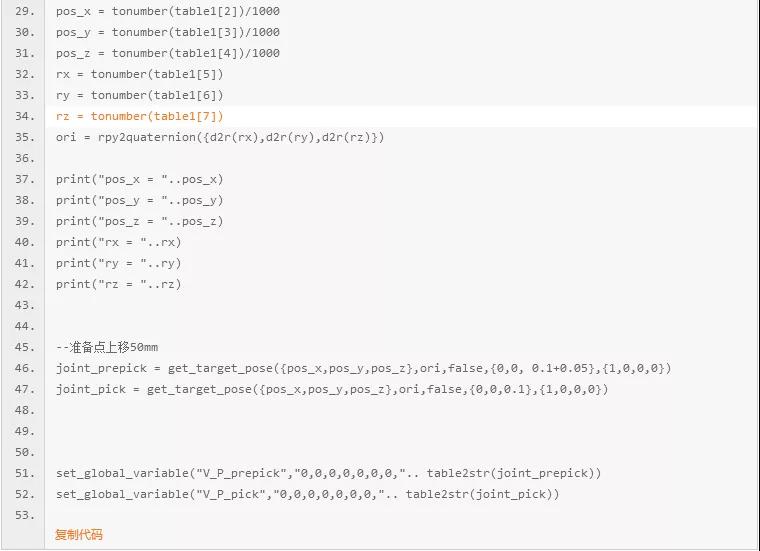
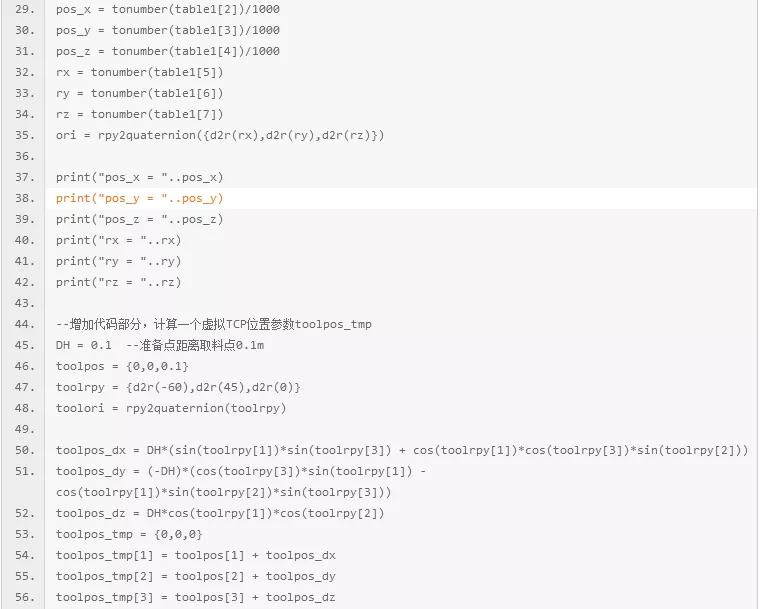
2、创建一个虚拟的TCP(将实际工具坐标系运动学参数Z增加),让虚拟TCP运动到给定坐标,实际TCP则在吸取平面法线上。
3、然后把工具坐标系切回实际TCP,再移动到给定坐标,即可实现取料路径垂直于吸取平面。
工作流程
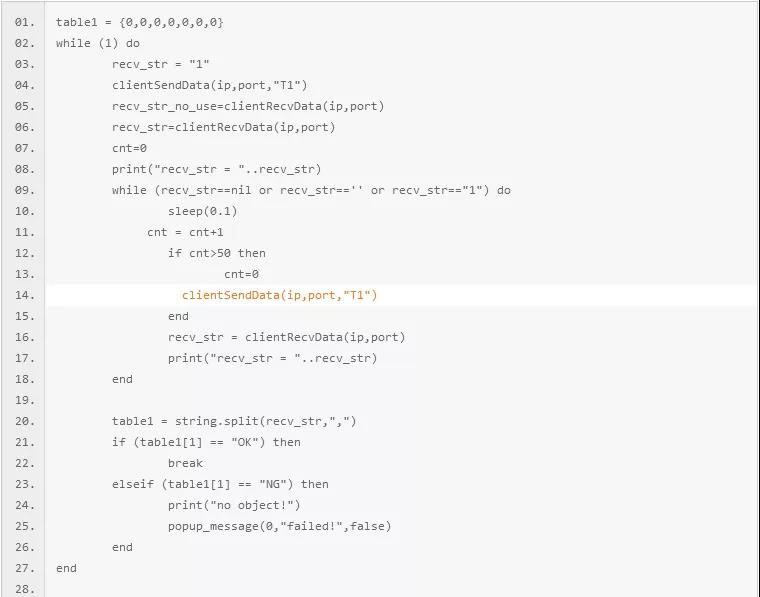
机器人和相机(工控机)之间走TCP/IP通信,机器人做为client,相机作为server。
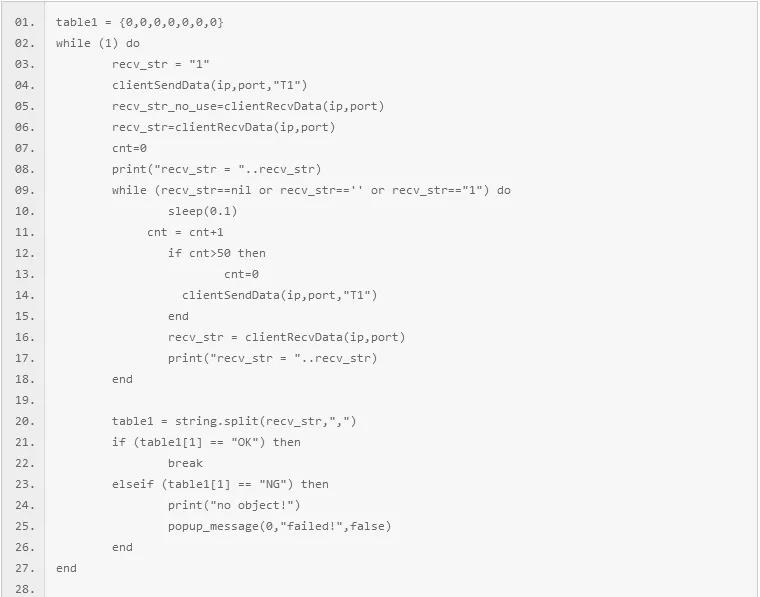
1、机器人给相机发送“T1”,触发相机拍照。
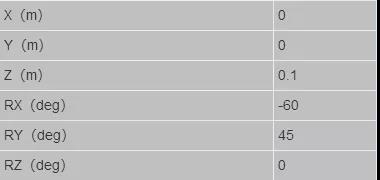
2、相机拍照成功返回“OK,0,0,0,0,0,0”。**ok,后六位为x,y,z,RX,RY,RZ。x\y\z单位m,RX\RY\RZ单位deg。
程序分享
1、新建路点变量

2、机器人工具运动学参数

3、工程
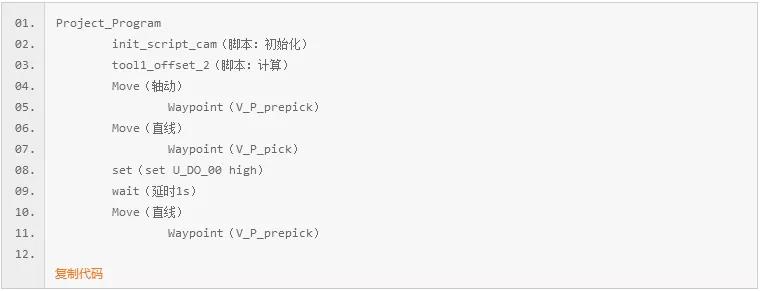
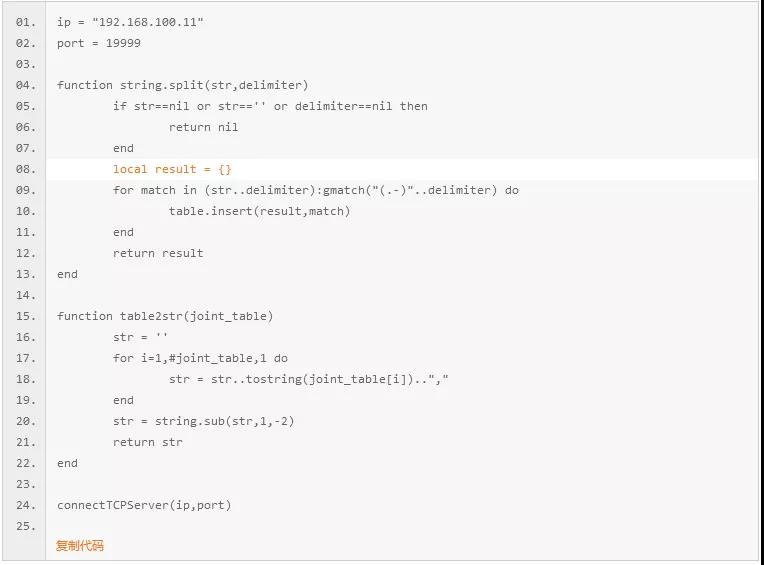
脚本init_script_cam.aubo
脚本tool1_offset_2.aubo
运行效果:
问题:
如果工具坐标系Z轴和flange_center坐标系Z轴不平行,该如何实现同样功能?
例如TCP运动学参数为
思路:
通过旋转变换把 工具坐标系的Z轴偏移 换算成flange_center坐标系下的XYZ位置偏移,然后补偿进原TCP参数中获得一个新的TCP运动学参数。
操作:
把tool1_offset_2脚本修改如下
运行结果:
了解更多遨博机器人产品:http://www.aubo-jxs.gbsrobot.com